|
衣帽架模式
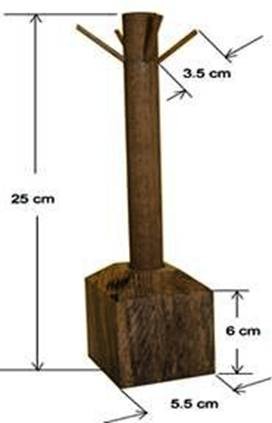
比赛中会在房间或走廊中放入如下图的衣帽架,上面会挂一些丝质物品,该衣帽架不会完全挡住机器人的行进方向。衣帽架可能放在任意房间或者走廊的任意位置。衣帽架不妨碍机器人的行进,衣帽架的摆放要求与家具模式中家具的摆放要求相同,具体位置在比赛开始前由现场抽签决定。
机器人不能移动该衣帽架,否则取消该模式加分。该模式系数0.8(OM=0.8)
非平坦地面模式
许多机器人在比赛场地上采用推测航行法。如果开始时导向正确,可以通过将移动的距离和转过的角度加到原来位置上来获得新的位置和方向。在比赛场地上这是一种合理的方法,但在现实生活中并不实用,因为现实中的地面经常是不平坦且不规则的。为了鼓励机器人采用更加复杂的方法来定位,我们给不使用推测航行法的机器人予以减分奖励。
使用推测航行法的关键是事先知道到比赛场地中不同房间的距离。在一般的导航模式下,赛场地面是平滑且是均匀的。如果你采用不平坦地面模式,我们将在比赛场地的走廊中加斜面来改变地面的一致性,且改变机器人轮子通过它的方式。比如在地面上放置一个模块使得地面略微抬高,这样让机器人的一个轮子走更长的距离。如果你决定采用非平坦地面模式,裁判将放置一个斜坡在赛场的走廊里,这将使进入房间的路径改变。因为机器人无法知道改变路径模块的确切位置,或者无法知道哪只轮子将受到影响以及影响多少,机器人将不得不采用其他的方法包括导航法来决定自己在赛场上的位置和方位。
在比赛中地面上会有一个斜坡。该斜坡将仅仅放置在走廊里而非房间里,斜坡不会被放置在门口的正前方,但有可能放在紧靠门口的地方。斜坡的位置在比赛开始前由现场抽签决定,将随着赛次改变。而斜坡将在回家模式比赛中的回家阶段保持不变。不要认为斜坡是一个路障,目的通过改变地面条件来破坏导航模式运行。机器人事先不知道斜坡的安放位置。
斜坡的最大高度是5cm,斜面与地面的夹角为15度。且尽量与地面光滑连接。地面模块的颜色和地面一样被漆成黑色。
成功运行这个模式,会有20%的减分奖励,即非平坦地面模式的得分系数是0.8(OM=0.8)。
变门模式
模式系数0.45(OM=0.45)这个模式中房间1和房间4的门的位置不确定(如下图的四种情况)。开始比赛前由现场抽签确定门的开口方向。
火焰位置模式
裁判会在每轮比赛前选择任意位置放置蜡烛,蜡烛可能被放在房间的任何位置,不会挡住门口,不会紧挨着墙壁,其他摆放的要求与家具模式中家具的摆放要求相同,具体位置在比赛开始前由现场抽签决定。
该模式的得分系数为0.75(OM=0.75)。相对于非火焰位置模式,有以下几点不同:
蜡烛位置任意:
蜡烛前面没有白色扇形纸板,只有蜡烛支架:
机器人灭火之前不需要距离蜡烛30cm,但是机器人必须做一个特殊的动作、亮灯或者其他的方式表示它找到了蜡烛,比赛开始前可以告知裁判是某种方式。如果同时选择家具模式,家具可能挡住机器人的视线,但是机器人还是要自主地搜寻火焰位置。
|